Published On Nov 15, 2022
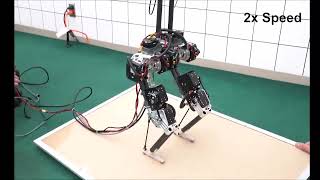
An emu-inspired robot with mechanical joint coordination and toe-triggered clutching action for energy efficient legged locomotion (BirdBot robot)
Alexander Badri-Spröwitz researches bioinspired legged locomotion. He and his team are developing legged machines and computer models to test mechanisms observed in cats, birds, spiders, and humans. Alexander is focusing on the biomechanics and neurocontrol of animals, and the mechanics and control of robots. He received his Diploma in Mechatronics from Ilmenau Technical University in Germany in 2005, and his Ph.D. in manufacturing systems and robotics from the Swiss Federal Institute of Technology (EPFL), Lausanne, in Switzerland in 2010. He worked with legged robots with Dr Auke Jan Ijspeert, at Oregon State University with Dr Jonathan Hurst, and with Dr Metin Sitti at the MPI in Stuttgart. With Dr Monica Daley, Alexander handled guinea fowls for locomotion experiments at the Royal Veterinary College in London. Since 2016, Alexander leads the research group 'Dynamic Locomotion' at the Max Planck Institute for Intelligent Systems in Stuttgart, Germany.
In nature, we observe gigantism in legged animals, for example in extinct bipedal animals such as the t-rex dinosaur. The fact that biped animals with multiple tons bodyweight walked across earth proves to us that legged locomotion - also legged robot locomotion - has at least one solution that is scalable to large body sizes and weights. The engineering of legged robots is challenging; we design mechanisms that are energy-efficient, lightweight, carry high loads, and function robustly during numerous operational cycles. Ideally, the mechanical design supports simple control. If we aim to build robots that support us in our every day, we need to improve the energy efficiency and scalability of existing leg designs. Legged robots' actuators draw power when loads change rapidly to support the robot’s mass during stance, and when cycling the leg’s state between stance and swing phases. Here, we demonstrate an emu- and ostrich-inspired robot leg design, BirdBot. Our robot challenges the reliance on rapid feedback control for joint coordination. BirdBot's leg design replaces active control with an intrinsic, mechanical coupling, reminiscent of a self-engaging and disengaging clutch. A spring tendon network rapidly switches the leg’s slack segments into a loadable state at touchdown, distributes load among joints, enables rapid disengagement at toe-off through elastically stored energy, and coordinates swing leg flexion. A bistable joint mediates the spring tendon network’s disengagement at the end of stance, powered by stance phase leg angle progression. We show reduced knee-flexing torque to a 10th of what is required for a comparable but nonclutching, parallel-elastic leg design. BirdBot's mechanisms enable bipedal locomotion with only four actuators, with high energy efficiency and minimalistic control. BirdBot's design is scalable, and we expect to see very large-legged robots designs in the near future. Similar leg mechanisms could be included in prostheses and orthoses designs.
Donate to Ingenuity Labs!
https://www.givetoqueens.ca/project/v...
By supporting this fund, you will be helping us purchase:
Computing equipment for AI research
New robots
Student research awards: e.g. Ingenuity Labs Thesis competition, scholarships