Published On May 28, 2016
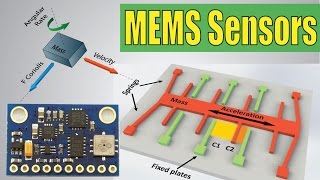
In this video I show how to configure and read from a GY-86 10DOF sensor breakout board. This board contains an InvenSense MPU6050 gyroscope / accelerometer, a Honeywell HMC5883L magnetometer and a Measurement Specialties MS5611 barometer. These sensors will be used in a balancing robot that I'm building and this video shows the first steps of how to interact with the sensors.
Source code for this project is available here:
https://github.com/farrellf/Balancing...
The sensor module I used is available from ICStation here:
http://www.icstation.com/10dof-ms5611...
This video is part of a series showing how to build a balancing robot:
Part 1: Modify RC Servos for Continuous Rotation and External H-Bridge Control
• Modify RC Servos for Continuous Rotat...
Part 2: Building a Robot Chassis with Brass Square Tube, a Dremel, and Solder
• Building a Robot Chassis with Brass S...
Part 3: [THIS VIDEO] First Steps with a GY-86 10DOF Sensor: MPU6050, HMC5883L and MS5611
• First Steps with a GY-86 10DOF Sensor...
Part 4: 6DOF & 9DOF Sensor Fusion with Madgwick's Filter, MPU6050, HMC5883L (GY-86 Module)
• 6DOF & 9DOF Sensor Fusion with Madgwi...
Part 5: How to Use CC2500 PA LNA 2.4GHz Wireless RF Modules
• How to Use CC2500 PA LNA 2.4GHz Wirel...
Part 6: GPU-Accelerated Data Logging and Telemetry
• GPU-Accelerated Arduino Data Logging ...
Part 7: How to Tune PID Control Loops Visually
• How to Visually Tune PID Control Loops